現代のペーター——紀伊山地でヤギとロボットと生きる
現代のペーター——紀伊山地でヤギとロボットと生きる
出典: note.com / 2026-06-01
あの『ハイジ』のペーターは山でヤギの世話をしながら生きた。何百年経ってもその生活の原型は変わらない。変わったのは——そばに立つ相棒がロボットになったことだけだ。

そもなぜペーターなのか
ハイジをご存じだろうか。アルプスの山で育った少女の物語だ。その中にペーターという少年が出てくる。彼は毎日ヤギの群れを連れて山に登る。ただそれだけの暮らしだ。なのに読者の心を掴んで離さない。
なぜか。答えは簡単だ。彼が「自由」だからだ。
資本に縛られず、時間に追われず、ただ山とヤギと共にある。あの生き方に人間の本質的な豊かさが凝縮されている。
紀伊山地は日本のアルプスだ。熊野古道の石畳は千年の時を刻んでいる。周辺の廃村は無数にある。人が去ったあとの木遺産地は——開拓者を待っている。
MULE——多用途運搬四足ロボット
ペーターに与えられた現代の相棒。それがMULE(ミュール)だ。Multi-Use Load-bearing Entity。荷物を運ぶラバの意味だ。
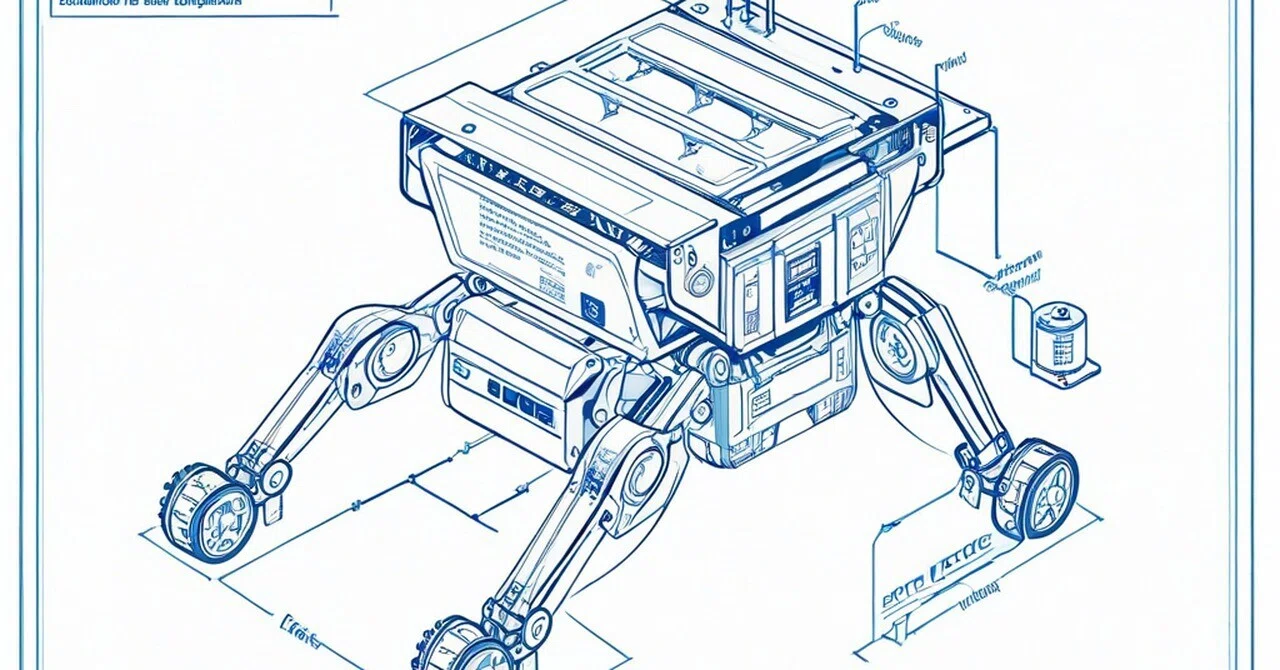
ベース機体はUnitree B2。中国Unitree Robotics社が開発した汎用四足ロボットだ。重量60kg。ペイロードは歩行中40kg、静止時120kg。最大速度6m/s。人間が走るより速い。
B2の背面には標準M6ネジ穴とガイドレールが備わっている。ここにテントパッケージを固定する。12V/24Vの電源出力ポートもあるから、サーボモーターや電動ポンプもここから給電できる。
Unitree B2 スペック
重量: 60kgペイロード(歩行): 40kgペイロード(静止): 120kg最大速度: 6m/s登坂角度: 45度伏せサイズ: 880 x 460 x 330mmバッテリー: 45Ah / 2250Wh (5時間)
テント展開機構——設計の核心
MULEの最も重要な機能。それは背中に搭載したテントを完全自動で展開することだ。この機構を理解するために、まず既存技術を見てみよう。
既存の自動展開テント技術
自動展開テントには主に四つの方式がある。
方式比較:
スプリングワイヤー式(Quechua 2 Seconds): 収納/展開比 10:1〜15:1、展開2秒、自動化△(サーボ制御困難)空気式/エアビーム(Heimplanet): 収納/展開比 5:1〜8:1、展開2-5分、自動化◎(電動ポンプで容易)ハブ式/放射状リンク(Gazelle T4): 収納/展開比 5:1〜7:1、展開30秒、自動化○(1サーボで制御可)折り紙構造(研究段階): 収納/展開比 20:1〜30:1、展開数秒、自動化◎(1-DOF最適) 最も普及しているのはQuechua型のスプリングワイヤー式だ。内蔵されたスチールバネの復元力で一気に展開する。2秒でテントが完成する。だが欠点もある。バネの力が強すぎてサーボで制御できない。収納は人力でねじる必要がある。完全自動化には向かない。
空気式は電動ポンプでエアビームを膨らませる方式だ。Heimplanet社のIDG構造は測地線ドームを形成し、高い耐風性を持つ。B2の12V電源でコンプレッサーを駆動できる。圧力センサーで展開完了を検知できる。制御がシンプルだ。ただし展開に数分かかる。ポンプの騒音もある。
ハブ式は中央の接続金具から放射状にポールが展開する。Gazelle T4が代表的だ。一つのサーボでハブを回転させるだけで全ポールが連動して展開する。機構がシンプルで故障が少ない。30秒程度で展開完了する。
そして研究段階だが最も有望なのが折り紙構造だ。一枚の平面素材から立体構造を形成する。収納効率が圧倒的に高い(20:1〜30:1)。一軸の動き(1-DOF)だけで展開するからサーボ制御に最適だ。天津大学やハーバードの研究チームが実用化を進めている。
MULE搭載テント——方式選定
検討の結果、MULEには「ハブ式+エア補助」のハイブリッド方式を採用する。理由は三つ。
第一にB2の背面スペースに合う。伏せたB2の背面上部は約450x600mmの矩形エリアだ。ハブ式ならこの範囲に展開機構を収められる。
第二に一つのサーボで制御できる。ハブを回転させるサーボは一つで済む。Savox SB-2290SG(54kg·cm、チタンギア)を想定する。これで全ポールが連動展開する。
第三にエア補助で速度と安定性を両立できる。ハブ機構で骨格を形成したあと、低圧エアでテント生地を緊張させる。これによりペグなしでもテントが自立する。風速センサーが強風を検知したら内部圧力を上げて補強する。
テント生地は20Dシリコンコーティングナイロン(シルナイロン)を採用する。重量は約42g/m²。耐水圧3000mm。フロア部のみ40D PUコーティングに切り替えて耐摩耗性を確保する。総重量はポールやサーボを含めて約5kg。B2の40kgペイロードに余裕で収まる。

展開の三段階
ステップ1——収納状態。 B2の背中に厚さ15cmのパッケージが固定されている。内部には折り畳まれたハブ機構とテント生地が収まっている。
ステップ2——展開。 B2が伏せる。サーボがハブを回転させる。四本のアームが放射状に広がる。6秒で骨格完成。
ステップ3——テント完成。 エアポンプが低圧充填を開始する。テント生地が緊張してドーム形状を形成する。アウターが張られた状態で完成。所要時間は約45秒だ。
撤収時は逆の手順だ。エアを排出しハブを逆回転させる。全てが元の厚さ15cmに収まる。収納も完全自動だ。
MULEの四つのモード
🚶 移動モード: ヤギの群れを自動追従。背中に荷物20kg。一日中歩く。
🏕️ 設営モード: 伏せてテント展開。中央柱になる。45秒で完成。
🪑 休憩モード: 背中が水平に開いてちゃぶ台に。お湯を沸かして茶を飲む。
🏃 緊急モード: 立ち乗りハンドル展開。時速6km。予備バッテリー込み4時間。

伏せたロボットの背中はちょうどいい高さのちゃぶ台になる。
ヤギとロボットと焚き火
想像してみてほしい。
朝、テントから出る。ヤギたちがもう起きている。ロボットが伏せたまま背中のパネルを開く。中から簡易ストーブとヤギの餌が出てくる。お湯を沸かしてコーヒーを飲む。
ヤギの群れが動き出す。ロボットがその後ろを歩き始める。自動追従。お前は何も操作しなくていい。ただ歩けばいい。

機械と自然は共存できる。むしろ補完し合う。
昼頃、適した開拓地を見つける。ロボットが中央に陣取って伏せる。サーボが唸る。45秒でテントが立ち上がる。
ポイントは自動張架だ。ペグを打つ必要がない。ロボットの自重でテントが固定される。風速センサーが風を検知すると自動で補強姿勢に移行する。
夜——星の下で

テントの中は暖かい灯りと静けさに包まれる。中央に見える構造体がロボットの背部だ。
紀伊山地の星空はアルプスに劣らない。天の川が肉眼で見える。流れ星が頻繁に横切る。この環境で暮らせること——それこそが真の豊かさだろう。
お前の最初の一歩
総予算は100万円を少し超える程度だ。家を買うより安い。車を買うより安い。これで一生遊べる——いや、新しい生き方が手に入る。
ペーターは山に行く。 ロボットを連れて。 ヤギを連れて。 AIを連れて。 そして——新しい世界を開く。
加藤出版社 / KeiTy’s Lab
この記事は note.com から KTBLOG に移行されました。元記事: https://note.com/famous_prawn2009/n/n6d1f6ebaf7a6